Journal of Shanghai University(Natural Science Edition) ›› 2023, Vol. 29 ›› Issue (1): 41-55.doi: 10.12066/j.issn.1007-2861.2413
• Research Articles • Previous Articles Next Articles
FANG Zhe1,2, ZHANG Jinyi1,2( ), JIANG Yuxi3
), JIANG Yuxi3
Received:2022-05-18
Online:2023-02-28
Published:2023-03-28
Contact:
ZHANG Jinyi
E-mail:zhangjinyi@shu.edu.cn
CLC Number:
FANG Zhe, ZHANG Jinyi, JIANG Yuxi. Foreground object perception and location algorithm based on semantic feature propagation model in MR[J]. Journal of Shanghai University(Natural Science Edition), 2023, 29(1): 41-55.

Fig. 1
Results of ORB feature extraction"

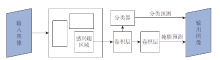
Fig. 2
Diagram of Mask R-CNN network structure"
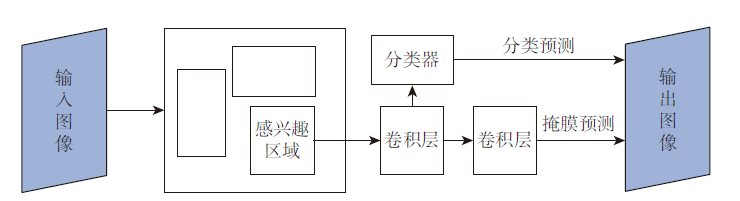
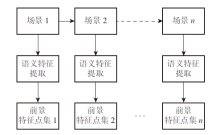
Fig. 3
Semantic feature extraction process of traditional location algorithm based on deep learning model"
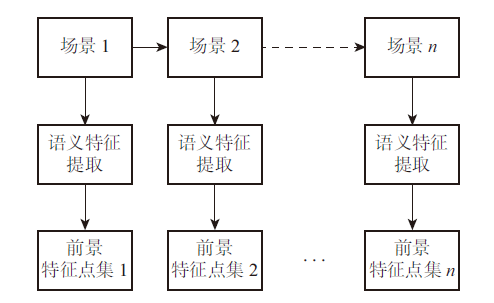
Fig. 4
Model structure of semantic feature propagation"
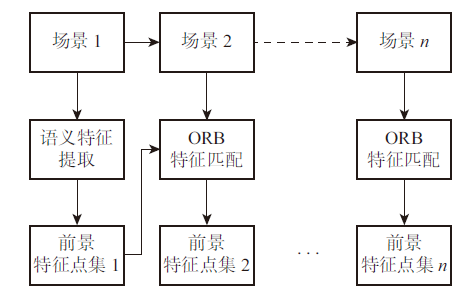
Fig. 5
Foreground object perception layer based on semantic feature propagation model"
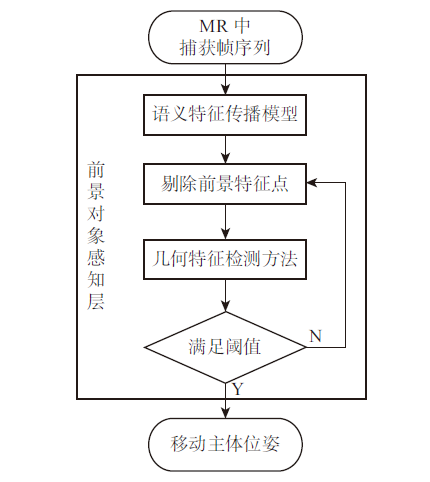
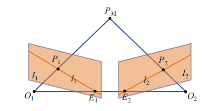
Fig. 6
Polar constraint property"
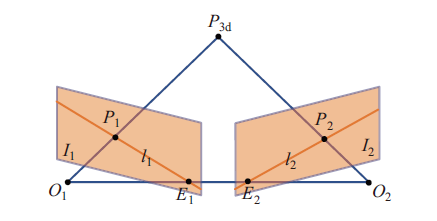
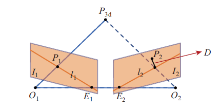
Fig. 7
Foreground feature points not satisfy the polar constraint"
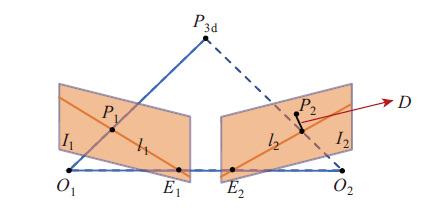

Fig. 8
Scene of public dataset TUM-RGBD"


Fig. 9
Scene containing foreground objects in the TUM dataset"
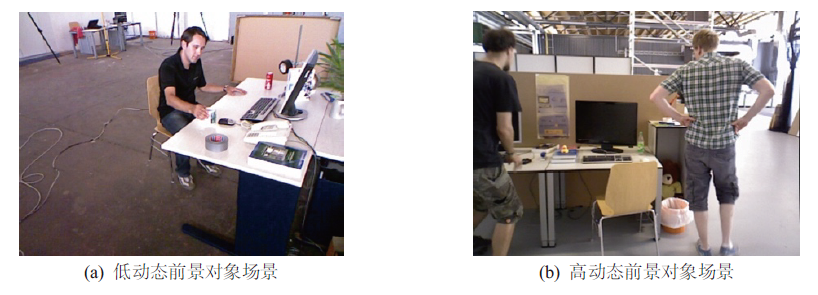
Table 1
Data set sequence selected in this work"
 |
Table 2
RMSE of relative pose error (RPE) of translation part"
 |
Table 3
RMSE of absolute trajectory error (ATE)"
 |
Table 4
Real-time measurement results of positioning ms"
 |
| [1] | 夏铁男, 刘金鑫, 陈挺, 等. 混合现实技术在腹膜后肿瘤手术中的应用[J]. 中国临床研究, 2021, 34(8): 1053-1056. |
| [2] | Wang P, Bai X, Billinghurst M, et al. An MR remote collaborative platform based on 3D CAD models for training in industry[C]// 2019 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct). 2019: 91-92. |
| [3] | Dalim C S C, Piumsomboon T, Dey A, et al. TeachAR: an interactive augmented reality tool for teaching basic english to non-native children[C]// 2016 IEEE International Symposium on Mixed and Augmented Reality (ISMAR-Adjunct). 2016: 344-345. |
| [4] | Younes G, Asmar D, Shammas E, et al. Keyframe-based monocular SLAM: design, survey, and future directions[J]. Robotics and Autonomous Systems, 2017, 98: 67-88. |
| [5] | 高兴波, 史旭华, 葛群峰, 等. 面向动态物体场景的视觉SLAM 综述[J]. 机器人, 2021, 43(6): 733-750. |
| [6] | Mur-Artal R, Tardós J D. ORB-SLAM2: an open-source SLAM system for monocular, stereo, and RGB-D cameras[J]. IEEE Transactions on Robotics, 2017, 33(5): 1255-1262. |
| [7] | Wang R, Wan W, Wang Y, et al. A new RGB-D SLAM method with moving object detection for dynamic indoor scenes[J]. Remote Sensing, 2019, 11(10): 1143. 1-1143.19. |
| [8] | Bescos B, FÁcil J M, Civera J, et al. DynaSLAM: tracking, mapping, and inpainting in dynamic scenes[J]. IEEE Robotics and Automation Letters, 2018, 3(4): 4076-4083. |
| [9] | Yu C, Liu Z, Liu X J, et al. DS-SLAM: a semantic visual SLAM towards dynamic environ- ments[C]// 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2018: 1168-1174. |
| [10] | Badrinarayanan V, Kendall A, Cipolla R. Segnet: a deep convolutional encoder-decoder architecture for image segmentation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(12): 2481-2495. |
| [11] | Rublee E, Rabaud V, Konolige K, et al. Orb: an efficient alternative to sift orsurf[C]// 2011 IEEE International Conference on Computer Vision (ICCV). 2011: 2564-2571. |
| [12] | He K, Gkioxari G, Dollvr P, et al. Mask R-CNN[C]// Proceedings of the IEEE International Conference on Computer Vision. 2017: 2961-2969. |
| [13] | 王榕榕, 徐树公, 黄剑波. 基于深度学习的图像抠图技术[J]. 上海大学学报(自然科学版), 2022, 28(2): 261-269. |
| [14] | Hartley R I. In defense of the eight-point algorithm[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1997, 19(6): 580-593. |
| [15] | Chum O, Matas J, Kittler J. Locally optimized RANSAC[C]// Proc of Joint Pattern Recognition Symposium. 2003: 236-243. |
| [16] | Sturm J, Engelhard N, Endres F, et al. A benchmark for the evaluation of RGB-D SLAM systems[C]// 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. 2012: 573-580. |
| [1] | LI Jiazhe, ZHU Jiejiang. Research on Optimization of the Location of Precast components in Prefabricated Shear Wall Structures [J]. Journal of Shanghai University(Natural Science Edition), 2023, 29(4): 720-733. |
| [2] | JI Yangbeibei , LU Xueqing , DONG Jichang , LAI Zerong . Shared parking slot allocation considering parking preferences and priorities of users [J]. Journal of Shanghai University(Natural Science Edition), 2023, 29(4): 681-693. |
| [3] | WU Tingying, REN Yating, ZHOU Zhili. A two-echelon capacitated facility location problem with depot size selection [J]. Journal of Shanghai University(Natural Science Edition), 2022, 28(6): 996-1007. |
| [4] | ANG Tingcai, JIANG Rui. An equilibrium analysis of commuting considering location of parking slot and walking cost in a two-to-one network [J]. Journal of Shanghai University(Natural Science Edition), 2022, 28(2): 201-214. |
| [5] | HUANG Xinlong, Lü Chenyangtao, SUN Yuyao, CHU Haijian. Molecular simulation of dislocation nucleation induced by nanosized helium bubbles in irradiated tungsten materials [J]. Journal of Shanghai University(Natural Science Edition), 2021, 27(6): 1065-1073. |
| [6] | HU Xiaoyu, DU Yapeng, CHU Haijian. Effect of hole opening on mechanical properties of polycrystalline plate based on crystal plastic finite element [J]. Journal of Shanghai University(Natural Science Edition), 2021, 27(3): 583-593. |
| [7] | GE Yingen, CHEN Zhijian, ZHANG Peng. A review of operations and management of shared mobility [J]. Journal of Shanghai University(Natural Science Edition), 2020, 26(3): 311-327. |
| [8] | HUANG Chunhui, ZHAO Qijie, KE Zhennan. Image segmentation for painting characters on billet surface [J]. Journal of Shanghai University(Natural Science Edition), 2018, 24(5): 763-772. |
| [9] | LIU Chanjuan, HU Zhihua. Two-stage model for outbound containers’ space allocation assignment using rolling horizon method [J]. Journal of Shanghai University(Natural Science Edition), 2017, 23(5): 789-800. |
| [10] | LI Ping1, YANG Ning1, ZHONG Shao-shan2. An Integrated Indoor Location Technology Based on RFID and DR [J]. Journal of Shanghai University(Natural Science Edition), 2014, 20(4): 498-504. |
| [11] | AI Ting, WU Zhuo. Power Allocation and Interference Mitigation Schemes for Cellular System with Base Station Cooperation on the Downlink [J]. Journal of Shanghai University(Natural Science Edition), 2013, 19(3): 259-265. |
| [12] | LI Juan-juan1, ZHANG Jin-yi1,2,3, ZHANG Bing-yu1, ZHOU Rong-jun2, TANG Xia2. Fuzzy Fingerprint Location for Bluetooth Specification Version 4.0 [J]. Journal of Shanghai University(Natural Science Edition), 2013, 19(2): 126-131. |
| [13] | WANG Dong, MIN Jia-hua, LIANG Xiao-yan, SUN Xiao-xiang, LIU Wei-wei, ZHANG Ji-jun, WANG Lin-jun. Analysis of Te Inclusions in CdZnTe Crystal Growth from Solution [J]. Journal of Shanghai University(Natural Science Edition), 2013, 19(1): 67-70. |
| [14] | XIANG Jin-feng, LEI Zhou, ZHANG Long, SHEN Wen-feng, DUAN Feng. Mobile Cloud Position Information Service Based on Relationship and State [J]. Journal of Shanghai University(Natural Science Edition), 2013, 19(1): 49-53. |
| [15] | JIN Yan-liang,ZHANG Yong,XUE Yong,ZHANG Zhen. Location Aided Routing Protocol Based on Congestion Control in Wireless Multimedia Sensor Network [J]. Journal of Shanghai University(Natural Science Edition), 2012, 18(3): 227-230. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||