上海大学学报(自然科学版) ›› 2019, Vol. 25 ›› Issue (5): 645-654.doi: 10.12066/j.issn.1007-2861.2041
所属专题: 无人艇
• 无人艇 • 下一篇
彭艳, 葛磊, 李小毛( ), 钟雨轩, 张鑫
), 钟雨轩, 张鑫
收稿日期:2017-10-14
出版日期:2019-10-30
发布日期:2019-10-31
通讯作者:
李小毛
E-mail:lixiaomao@shu.edu.cn
基金资助:
Yan PENG, Lei GE, Xiaomao LI(), Yuxuan ZHONG, Xin ZHANG
Received:2017-10-14
Online:2019-10-30
Published:2019-10-31
Contact:
Xiaomao LI
E-mail:lixiaomao@shu.edu.cn
摘要:
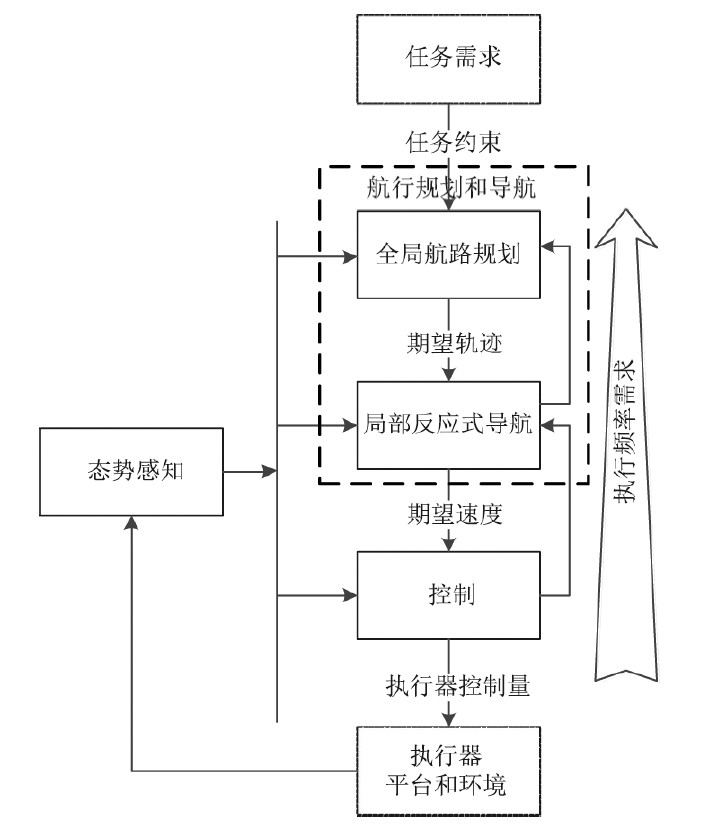
无人水面艇(unmanned surface vehicle,USV)是一种在水面进行自主航行的运载平台,属于海洋机器人的一个重要分支, 在军用和民用领域均有广泛的应用前景.由于海洋环境恶劣, 以及无人水面艇运动模型非常特殊(如模型高度非线性、强时滞性和时变性等), 使得较于无人车和无人机等其他无人系统,无人水面艇的研究面临着特殊的挑战.从态势感知、航行规划和导航、控制这 3 个方面总结了无人水面艇的研究现状和主要成果,得出了无人水面艇在国内外不同的发展现状和趋势.最后还对无人水面艇的应用需求进行了分析与展望.
中图分类号:
彭艳, 葛磊, 李小毛, 钟雨轩, 张鑫. 无人水面艇研究现状与发展趋势[J]. 上海大学学报(自然科学版), 2019, 25(5): 645-654.
Yan PENG, Lei GE, Xiaomao LI, Yuxuan ZHONG, Xin ZHANG. Research status and development trend of unmanned surface vehicle[J]. Journal of Shanghai University(Natural Science Edition), 2019, 25(5): 645-654.
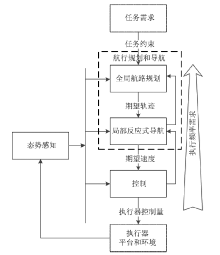
图1
态势感知、航行规划和导航、控制的关系框图"
| [1] | Huntsberger T, Woodward G . Intelligent autonomy for unmanned surface and underwater vehicles[C]// Oceans. 2011: 1-10. |
| [2] | Mukhtar A, Xia L, Tang T B . Vehicle detection techniques for collision avoidance systems: a review[J]. IEEE Transactions on Intelligent Transportation Systems, 2015,16(5):2318-2338. |
| [3] | Fossel J, Hennes D, Claes D , et al. OctoSLAM: a 3D mapping approach to situational awareness of unmanned aerial vehicles[C]// International Conference on Unmanned Aircraft Systems. 2013: 179-188. |
| [4] | Almeida C, Franco T, Ferreira H , et al. Radar based collision detection developments on USV ROAZ Ⅱ[C]// Oceans. 2009: 1-6. |
| [5] | Halterman R, Bruch M . Velodyne HDL-64E lidar for unmanned surface vehicle obstacle detection[C]// Proceeding of SPIE, International Society for Optics. 2010. |
| [6] | Lee S J, Yong S M, Ko N Y , et al. A method for object detection using point cloud measurement in the sea environment[C]// Underwater Technology. 2017: 1-4. |
| [7] | 李小毛, 张鑫, 王文涛 , 等. 基于3D 激光雷达的无人水面艇海上目标检测[J]. 上海大学学报(自然科学版), 2017,23(1):27-36. |
| [8] | Heidarsson H K, Sukhatme G S . Obstacle detection and avoidance for an autonomous surface vehicle using a profiling sonar[C]// 2011 IEEE International Conference on Robotics and Automation. 2011: 731-736. |
| [9] | Leedekerken J C, Fallon M F, Leonard J J . Mapping complex marine environments with autonomous surface craft[J]. Springer Tracts in Advanced Robotics, 2014,79:525-539. |
| [10] | Wolf M T, Assad C, Kuwata Y , et al. 360-degree visual detection and target tracking on an autonomous surface vehicle[J]. Journal of Field Robotics, 2010,27(6):819-833. |
| [11] | Wang H, Wei Z, Wang S , et al. A vision-based obstacle detection system for unmanned surface vehicle[C]// Robotics, Automation and Mechatronics. 2011: 364-369. |
| [12] | Wang H, Mou X, Mou W , et al. Vision based long range object detection and tracking for unmanned surface vehicle[C]// International Conference on Cybernetics and Intelligent Systems. 2015: 101-105. |
| [13] | Wang H, Wei Z . Stereovision based obstacle detection system for unmanned surface vehicle [C]// 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO). 2013: 917-921. |
| [14] | Hermann D, Galeazzi R, Andersen J C , et al. Smart sensor based obstacle detection for high-speed unmanned surface vehicle[J]. IFAC Proceedings Volumes, 2015,48(16):190-197. |
| [15] | Lekkas A M . Guidance and path-planning systems for autonomous vehicles[D]. Trondheim: Norwegian University of Science and Technology, 2014. |
| [16] | Galceran E, Carreras M . A survey on coverage path planning for robotics[J]. Robotics and Autonomous Systems, 2013,61(12):1258-1276. |
| [17] | Nilsson N J . Principles of artificial intelligence[M]. San Francisco: Morgan Kaufmann, 2014. |
| [18] | Stentz A . Optimal and efficient path planning for partially-known environments[C]// 2010 IEEE International Conference on Robotics and Automation. 1994: 3310-3317. |
| [19] | Yang S X, Luo C . A neural network approach to complete coverage path planning[J]. IEEE Transactions on Systems, Man, and Cybernetics, 2004,34(1):718-724. |
| [20] | Dubins L E . On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal positions and tangents[J]. American Journal of Mathematics, 1957,79(3):497-516. |
| [21] | Lekkas A M, Dahl A R, Breivik M , et al. Continuous-curvature path generation using fermat's spiral[J]. Modeling Identification and Control, 2013,34(4):183-198. |
| [22] | Tsourdos A, White B, Shanmugavel M . Cooperative path planning of unmanned aerial vehicles[M]. New York: John Wiley, 2010. |
| [23] | Candeloro M, Lekkas A M, Sørensen A J , et al. Continuous curvature path planning using voronoi diagrams and fermat's spirals[J]. IFAC Proceedings Volumes, 2013,46(33):132-137. |
| [24] | Breivik M, Houstein V E, Fossen T I . Straight-line target tracking for unmanned surface vehicles[J]. Modeling, Identification and Control, 2008,29(4):131-149. |
| [25] | Breivik M, Fossen T I . Applying missile guidance concepts to motion control of marine craft[J]. IFAC Proceedings Volumes, 2007,40(17):349-354. |
| [26] | Breivik M, Fossen T I . Guidance laws for planar motion control[C]// 2008 47th IEEE Conference on Decision and Control. 2008: 570-577. |
| [27] | Shneydor N A . Missile guidance and pursuit: kinematics, dynamics and control[M]. Amsterdam, Netherland: Elsevier, 1998. |
| [28] | Lekkas A M, Fossen T I . A time-varying lookahead distance guidance law for path following[J]. IFAC Proceedings Volumes, 2012,45(27):398-403. |
| [29] | Fossen T I, Pettersen K Y, Galeazzi R . Line-of-sight path following for dubins paths with adaptive sideslip compensation of drift forces[J]. IEEE Transactions on Control Systems Technology, 2015,23(2):820-827. |
| [30] | Gates D J . Nonlinear path following method[J]. Journal of Guidance, Control, and Dynamics, 2010,33(2):321. |
| [31] | Kuang T C, Richard B, Alistair G . Review of collision avoidance and path planning methods for ships in close range encounters[J]. The Journal of Navigation, 2009,62(3):455-476. |
| [32] | Statheros T, Howells G, McDonald-Maier K , et al. Autonomous ship collision avoidance navigation concepts, technologies and techniques[J]. The Journal of Navigation, 2008,61(1):129-142. |
| [33] | Fiorini P, Shiller Z . Motion planning in dynamic environments using the relative velocity paradigm[C]// IEEE International Conference on Robotics and Automation. 1993: 560-565. |
| [34] | Lee S M, Kwon K Y, Joh J . A fuzzy logic for autonomous navigation of marine vehicles satisfying COLREG guidelines[J]. International Journal of Control, Automation, and Systems, 2004,2(2):171-181. |
| [35] | Aurenhammer F . Voronoi diagrams: a survey of a fundamental geometric data structure[J]. ACM Computing Surveys (CSUR), 1991,23(3):345-405. |
| [36] | Naeem W, Irwin G W, Yang A . COLREGs-based collision avoidance strategies for unmanned surface vehicles[J]. Mechatronics, 2012,22(6):669-678. |
| [37] | Kuwata Y, Wolf M T, Zarzhitsky D , et al. Safe maritime autonomous navigation with COLREGS, using velocity obstacles[J]. IEEE Journal of Oceanic Engineering, 2014,39(1):110-119. |
| [38] | Stenersen T . Guidance system for autonomous surface vehicles[D]. Trondheim: Norwegian University of Science and Technology, 2015. |
| [39] | Perera L P, Ferrari V, Santos F P . Experimental evaluations on ship autonomous navigation and collision avoidance by intelligent guidance[J]. IEEE Journal of Oceanic Engineering, 2015,40(2):374-387. |
| [40] | Woerner K . Multi-contact protocol-constrained collision avoidance for autonomous marine vehicles[D]. Boston: Massachusetts Institute of Technology, 2016. |
| [41] | Shah B C . Planning for autonomous operation of unmanned surface vehicles [D]. Maryland, USA: University of Maryland,College Park, 2016. |
| [42] | Shah B C, švec P, Bertastka I R . Trajectory planning with adaptive control primitives for autonomous surface vehicles operating in congested civilian traffic[C]// International Conference on Intelligent Robots and Systems. 2014: 2312-2318. |
| [43] | švec P, Thukur A, Raboin E , et al. Target following with motion prediction for unmanned surface vehicle operating in cluttered environments[J]. Autonomous Robots, 2014,36(4):383-405. |
| [44] | Mullins G E, Gupta S K . Adversarial blocking techniques for autonomous surface vehicles using model-predictive motion goal computation[C]// International Conference on Intelligent Robots and Systems. 2015: 2272-2278. |
| [45] | Candeloro M, Lekka A M, Sørensen A J , et al. A Voronoi-diagram-based dynamic path-planning system for underactuated marine vessels[J]. Control Engineering Practice, 2017,61:41-54. |
| [46] | Liu Z X, Zhang Y M, Yu X , et al. Unmanned surface vehicles: an overview of developments and challenges[J]. Annual Reviews in Control, 2016,41:71-93. |
| [47] | Shi Y, Shen C, Fang H Z , et al. Advanced control in marine mechatronic systems: a survey[J]. IEEE/ASME Transactions on Mechatronics, 2017,22(3):1121-1131. |
| [48] | Erunsal I K . System identification and control of a sea surface vehicle[D]. Ankara: Middle East Technical University, 2015. |
| [49] | Fossen T I . Handbook of marine craft hydrodynamics and motion control[M]. New Jersey: John Wiley and Sons, 2011. |
| [50] | Fossen T I . Guidance and control of ocean vehicles[M]. New Jersey: John Wiley and Sons Inc, 1994. |
| [51] | Fossen T I . Marine control systems: guidance, navigation and control of ships, rigs and underwater vehicles[M]. Trondheim: Marine Cybernetics, 2002. |
| [52] | Yu Z Y, Bao X P, Nonami K , et al. Course keeping control of an autonomous boat using low cost sensors[J]. Journal of System Design and Dynamics, 2008,2(1):389-400. |
| [53] | Sonnenburg C R, Woolsey C A . Modeling, identification, and control of an unmanned surface vehicle[J]. Journal of Field Robotics, 2013,30(3):371-398. |
| [54] | Journee J M J . A simple method for determining the manoeuvring indices $k$ and $t$ from zigzag trial data[J]. Translated Report, 1970,267:1-9. |
| [55] | Perera L P, Oliveira P, Guedes S C , et al. System identification of nonlinear vessel steering[J]. Journal of Offshore Mechanics and Arctic Engineering, 2015,137(3):031302. |
| [56] | Annamalai A S K, Sutton R, Yang C . Robust adaptive control of an uninhabited surface vehicle[J]. Journal of Intelligent and Robotic Systems, 2015,78(2):319. |
| [57] | Skjetne R, Smogeli Q N, Fossen T I . A nonlinear ship manoeuvering model: identification and adaptive control with experiments for a model ship[J]. Modeling, Identification and Control, 2004,25(1):3. |
| [58] | Sørensen A J . A survey of dynamic positioning control systems[J]. Annual Reviews in Control, 2011,35(1):123-136. |
| [59] | Do K D, Pan J . Control of ships and underwater vehicles: design for underactuated and nonlinear marine systems[M]. London: Springer-Verlag, 2009. |
| [60] | Huang J S, Wen C Y, Wang W , et al. Global stable tracking control of underactuated ships with input saturation[J]. Systems and Control Letters, 2015,85:1-7. |
| [61] | Do K D, Jiang Z P, Pan J . Robust adaptive path following of underactuated ships[J]. Automatica, 2004,40(6):929-944. |
| [62] | Fossen T I, Lekkas A M . Direct and indirect adaptive integral line-of-sight path-following controllers for marine craft exposed to ocean currents[J]. International Journal of Adaptive Control and Signal Processing, 2017,31(4):445-463. |
| [63] | Hu X, Du J L, Shi J W . Adaptive fuzzy controller design for dynamic positioning system of vessels[J]. Applied Ocean Research, 2015,53:46-53. |
| [64] | Liu W, Motiwani A, Sharma S , et al. Fault tolerant navigation of USV using fuzzy multi-sensor fusion [R]. Technical Report, 2014. |
| [65] | Nielsen U D . A concise account of techniques available for shipboard sea state estimation[J]. Ocean Engineering, 2017,129:352-362. |
| [66] | Breivik M, Fossen T I . Path following for marine surface vessels[C]// Oceans. 2004: 2282-2289. |
| [1] | 袁晓宇, 黄承义, 彭艳, 瞿栋, 刘东柯. 无人水面艇操纵模型分级辨识方法[J]. 上海大学学报(自然科学版), 2020, 26(6): 896-908. |
| [2] | 陈伟, 杨毅, 李小毛, 刘远, 张鑫. 基于目标候选的 USV 海上船艇检测[J]. 上海大学学报(自然科学版), 2019, 25(5): 668-678. |
| [3] | 胡辛明1, 张鑫1, 钟雨轩1, 彭艳青2, 杨毅1, 姚骏峰1. 无人水面艇仿真系统设计与实现[J]. 上海大学学报(自然科学版), 2017, 23(1): 56-67. |
| [4] | 钟雨轩, 葛磊, 张鑫, 彭艳, 杨毅, 李小毛. 无人水面艇岛礁海域完全遍历路径规划[J]. 上海大学学报(自然科学版), 2017, 23(1): 17-26. |
| [5] | 张洋洋, 瞿栋, 柯俊, 李小毛. 基于速度障碍法和动态窗口法的无人水面艇动态避障[J]. 上海大学学报(自然科学版), 2017, 23(1): 1-16. |
| [6] | 李小毛, 张鑫, 王文涛, 瞿栋, 祝川. 基于3D激光雷达的无人水面艇海上目标检测[J]. 上海大学学报(自然科学版), 2017, 23(1): 27-36. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||