上海大学学报(自然科学版) ›› 2019, Vol. 25 ›› Issue (5): 668-678.doi: 10.12066/j.issn.1007-2861.1981
所属专题: 无人艇
陈伟, 杨毅, 李小毛( ), 刘远, 张鑫
), 刘远, 张鑫
Wei CHEN, Yi YANG, Xiaomao LI(), Yuan LIU, Xin ZHANG
摘要:
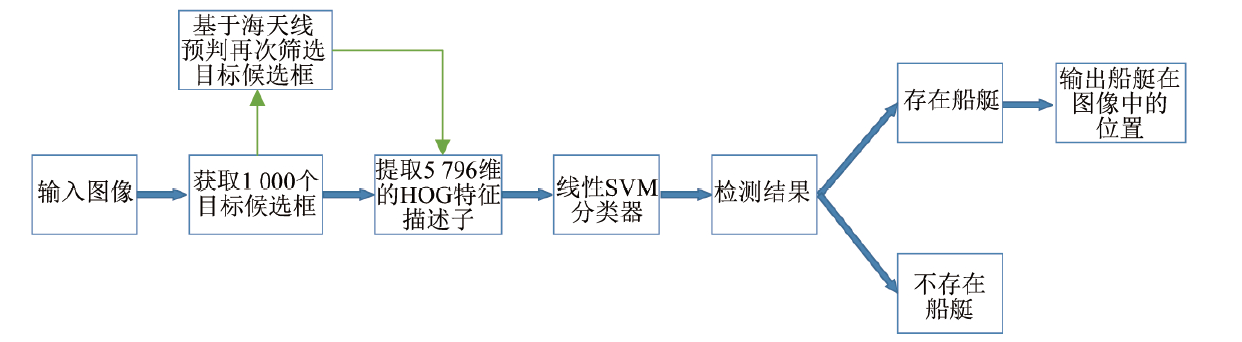
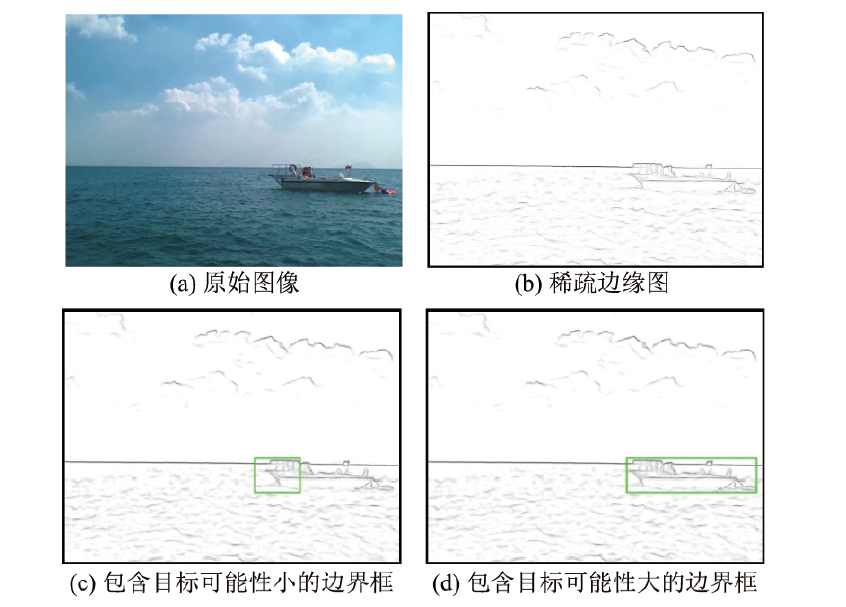
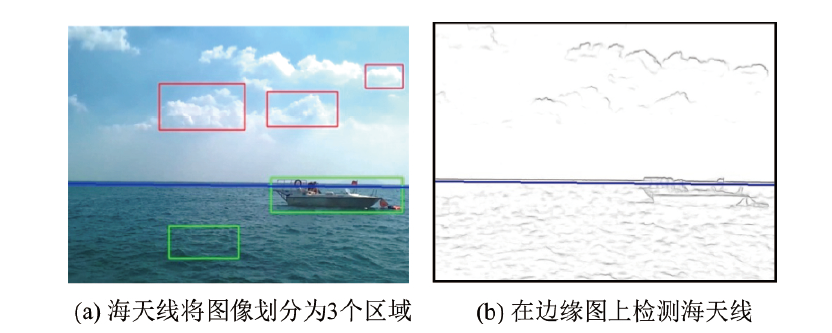
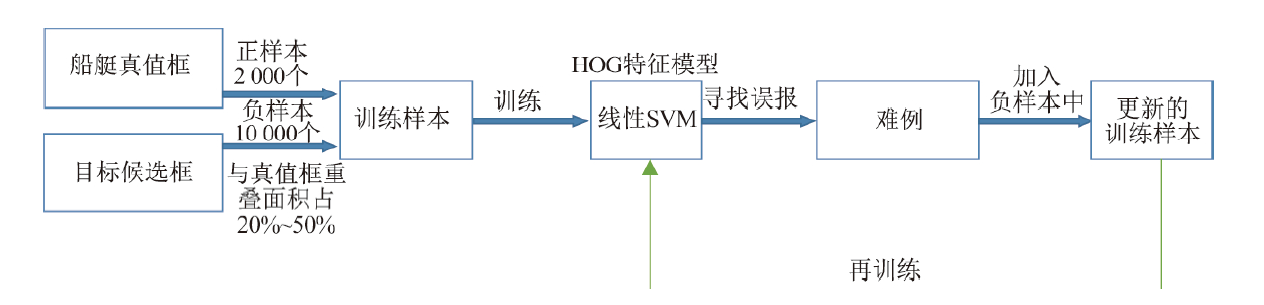
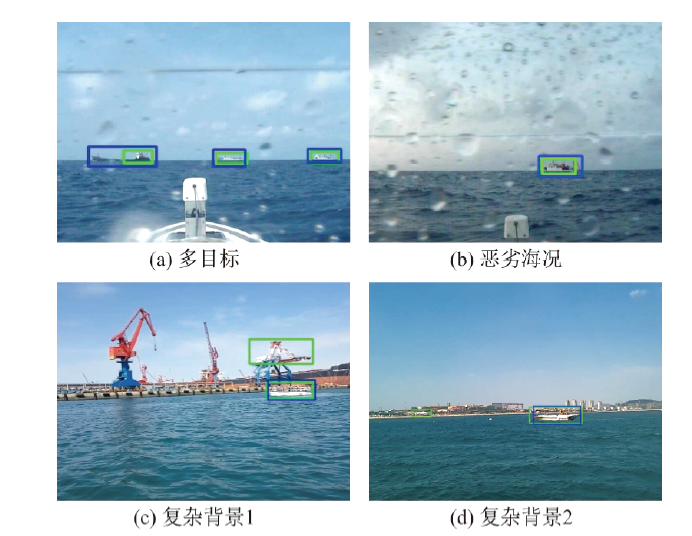
海上船艇检测是无人水面艇(unmanned surface vehicle,USV)视觉系统最主要的任务之一. 提出了一种基于目标候选(objectproposal)的 USV 海上船艇检测算法. 首先, 基于改进的边缘框(edgebox)算法提取了图像的边缘信息,并建立"目标性"评分函数获取目标候选框; 然后,对船艇目标进行方向梯度直方图(histogram of oriented gradient,HOG)特征进行建模, 利用支持向量机(support vector machine, SVM),采用"自举法"训练分类器进行迭代; 最后,将目标候选框的特征描述子输入到分类器中, 对船艇进行检测. 此外,基于 USV 在海天环境下的运行场景,结合海天线的特性进一步提升算法的检测性能. 实验结果表明,该算法能快速、准确地检测船艇目标, 且具有较高的检测率,对尺度以及光照条件的变化也有较强的鲁棒性.
中图分类号: