| [1] |
刘群芳 . 基于稀疏 A* 算法与进化算法的无人机动态航迹规划研究[D]. 南昌: 南昌航空大学, 2016.
|
| [2] |
Meng Z, Huang P, Yan J. Trajectory planning for hypersonic vehicle using improved sparse A* algorithm [C]// International Conference on Advanced Intelligent Mechatronics. 2008: 1152-1157.
|
| [3] |
Nikolos I K, Valavanis K P, Tsourveloudis N C , et al. Evolutionary algorithm based offline/online path planner for UAV navigation[J]. IEEE Transactions on Systems, Man, and Cybernetics Part B, 2003,33(6):898-912.
|
| [4] |
Nikolos I K, Brintaki A N . Coordinated UAV path planning using differential evolution[J]. Operational Research, 2005,5(3):487-502.
|
| [5] |
Foo J L, Knutzon J, Kalivarapu V , et al. Path planning of unmanned aerial vehicles using B-splines and particle swarm optimization[J]. Journal of Aerospace Computing Information & Communication, 2009,6(4):271-290.
|
| [6] |
Roberge V, Tarbouchi M, Labonte G . Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning[J]. IEEE Transactions on Industrial Informatics, 2012,9(1):132-141.
|
| [7] |
朱艳, 游晓明, 刘升 . 基于改进蚁群算法的机器人路径规划问题研究[J]. 计算机工程与应用, 2018,54(19):129-134.
|
| [8] |
武健, 舒健生, 李亚雄 . 基于人工免疫克隆选择算法的无人机三维航迹规划[J]. 系统工程与电子技术, 2018(1):86-90.
|
| [9] |
陈侠, 艾宇迪 . 应用改进神经网络的无人机三维航迹规划[J]. 电光与控制, 2018,25(9):7-11.
|
| [10] |
郑昌文, 严平, 丁明跃 . 飞行器航迹规划研究现状与趋势[J]. 宇航学报, 2007,28(6):7-12.
|
| [11] |
Geng L, Zhang Y F, Wang J J , et al. Cooperative mission planning with multiple UAVs in realistic environments[J]. Unmanned Systems, 2014,2(1):73-86.
|
| [12] |
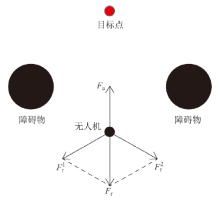
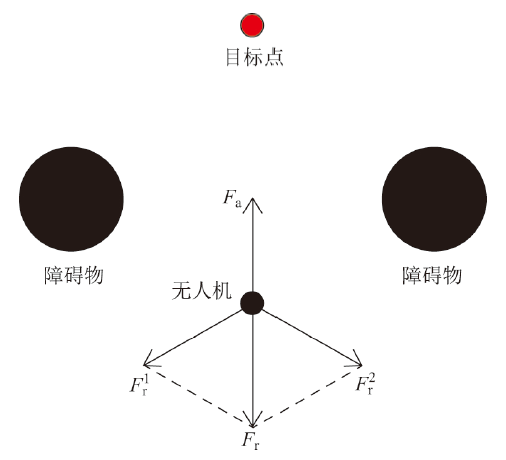
Khatib O . Real-time obstacle avoidance for robot manipulator and mobile robots[J]. International Journal of Robotics Research, 1986,5:90-98.
|
| [13] |
Orozco-Rosas U, Montiel O, Sepúlveda R . Mobile robot path planning using membrane evolutionary artificial potential field[J]. Applied Soft Computing, 2019,77:236-251.
|
| [14] |
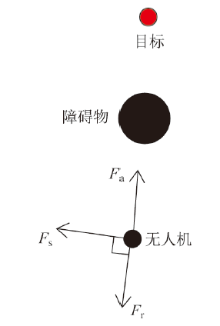
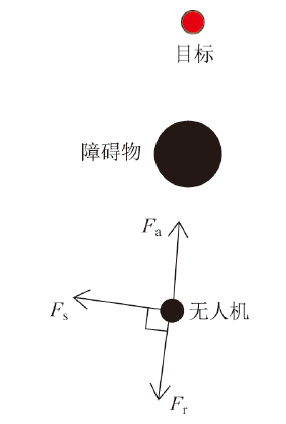
郜辉, 吕志刚 . 人工势场法目标不可达的研究[J]. 国外电子测量技术, 2018,37(1):29-33.
|
 ), 张丹3, 李春欣4
), 张丹3, 李春欣4