上海大学学报(自然科学版) ›› 2018, Vol. 24 ›› Issue (4): 564-571.doi: 10.12066/j.issn.1007-2861.1830
鲍深1, 张金艺1,2( ), 姚维强1, 梁滨2
), 姚维强1, 梁滨2
BAO Shen1, ZHANG Jinyi1,2(), YAO Weiqiang1, LIANG Bin2
摘要:
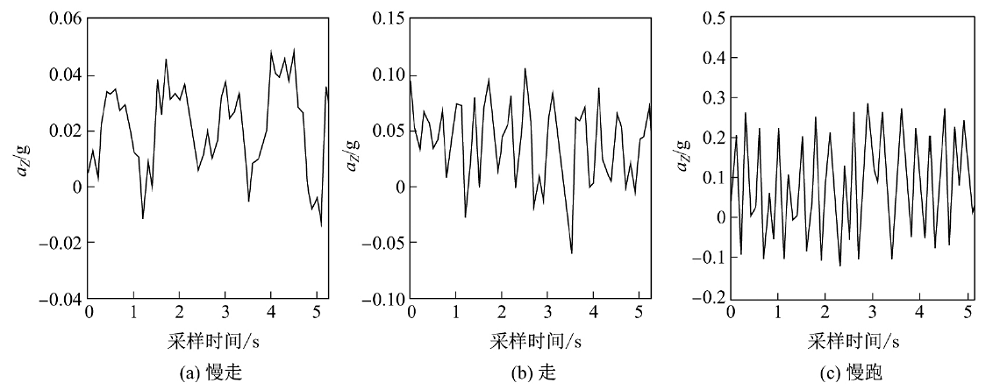
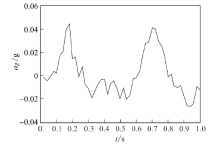
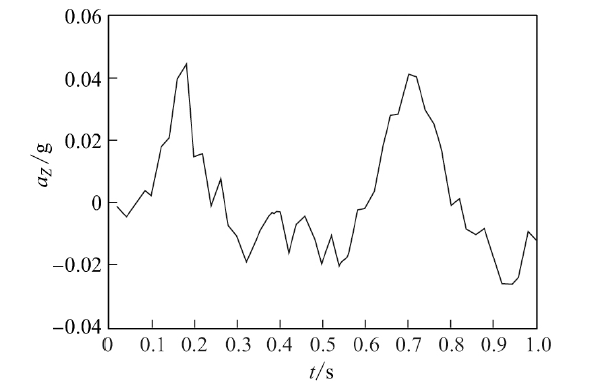
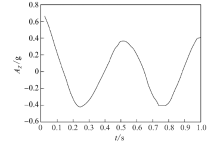
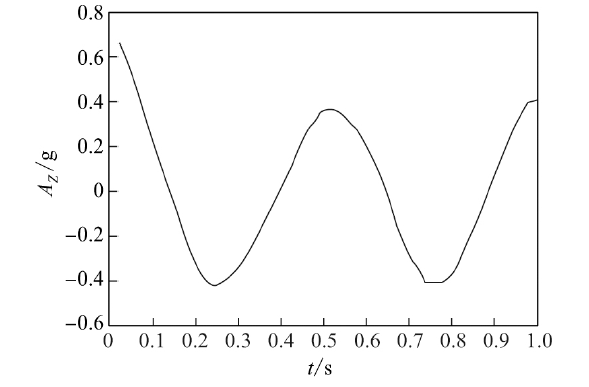
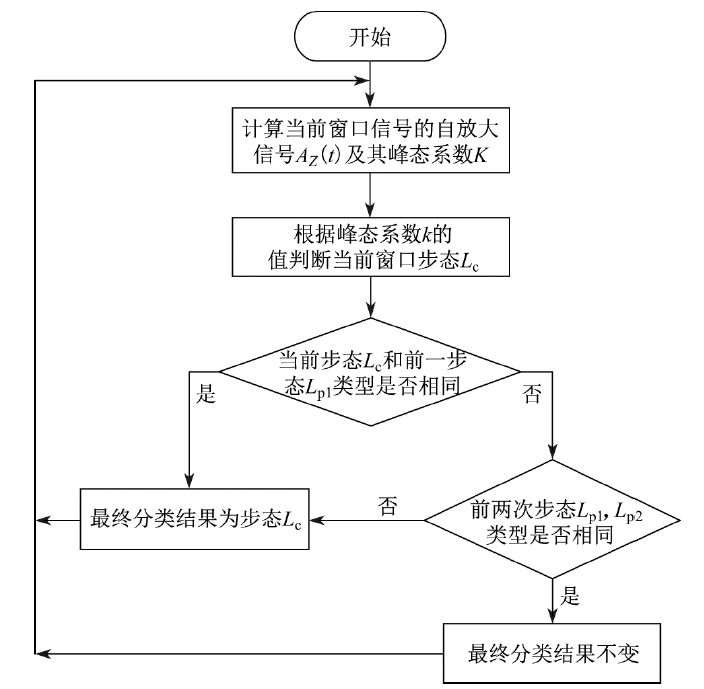
步态是人的一种生物特征, 在定位导航领域具有重要的研究意义. 基于微机电系统 (micro-electro-mechanical system, MEMS)惯性传感器技术的行人步态分类方法大多是使用加速度峰值判别法对当前行人步态进行识别. 但布朗运动造成的仪器自有噪声及环境等因素的干扰, 使得采集到的信号带有许多伪峰值, 降低了最终分类结果的精度. 针对这一问题, 从整体波形角度出发, 提出一种基于峰度系数的行人水平行走步态细化分类算法. 该算法首先使用快速傅里叶变换将 MEMS 传感器采集的行人前进方向的步态加速度信号从时域转换到频域, 获得频域信号后再对其模值取平方; 然后通过傅里叶逆变换回到时域, 得到原信号的自放大信号, 并除去大部分的伪峰值; 最后计算自放大信号的峰度系数, 通过对峰度系数值的分析, 达到对慢走、走、慢跑进行区分的目的. 验证结果表明: 该算法的步态识别率达到 98.62%; 与加速度值-频率功率融合算法相比, 整体分类精度提高了 7.37%.
中图分类号: