上海大学学报(自然科学版) ›› 2019, Vol. 25 ›› Issue (1): 66-74.doi: 10.12066/j.issn.1007-2861.1987
郁怀波1,2, 胡越黎1,2,3( ), 徐杰1,2
), 徐杰1,2
YU Huaibo1,2, HU Yueli1,2,3(), XU Jie1,2
摘要:
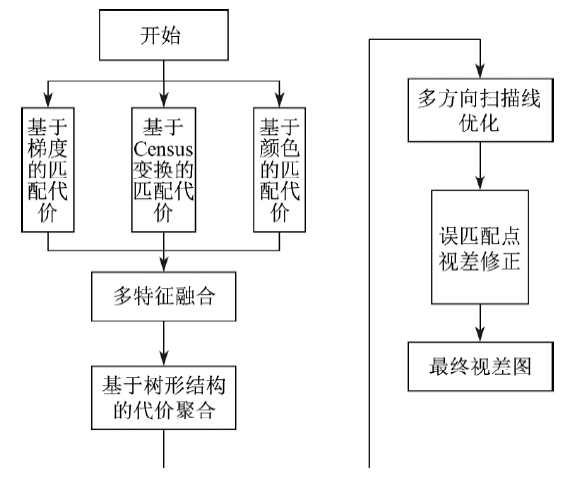
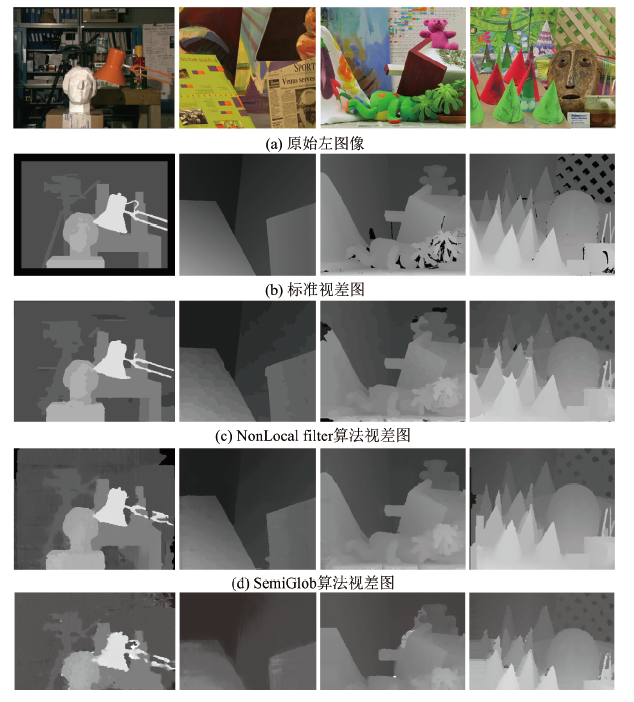
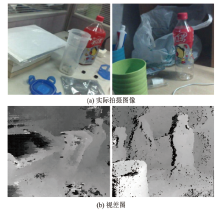
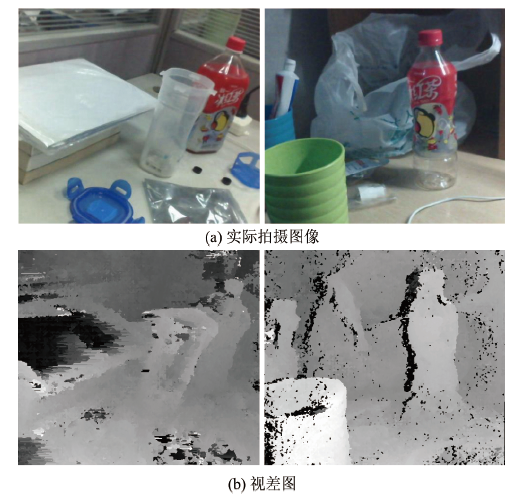
针对立体匹配中弱纹理区域和深度不连续区域的匹配精度问题, 提出了一种基于多特征融合的树形结构代价聚合立体匹配算法. 首先, 融合图像颜色、梯度和图像的 Census 变换进行匹配代价计算; 然后, 在由原始图像生成的最小生成树上进行匹配代价聚合, 并使用多方向扫描线优化, 进一步提升立体匹配的精确度; 最后, 使用左右一致性检测标记出误匹配点, 并进行视差修正. 为了验证该算法的有效性, 使用 Middlebury 测试集提供的测试图像进行测试, 平均误匹配率为 6.38%; 分别对 2 种场景实际拍摄图像进行深度信息提取误差率测试, 测试得到 2 种场景的测距误差率分别为 5.76% 和 5.55%, 证明了该算法的实用性.
中图分类号: